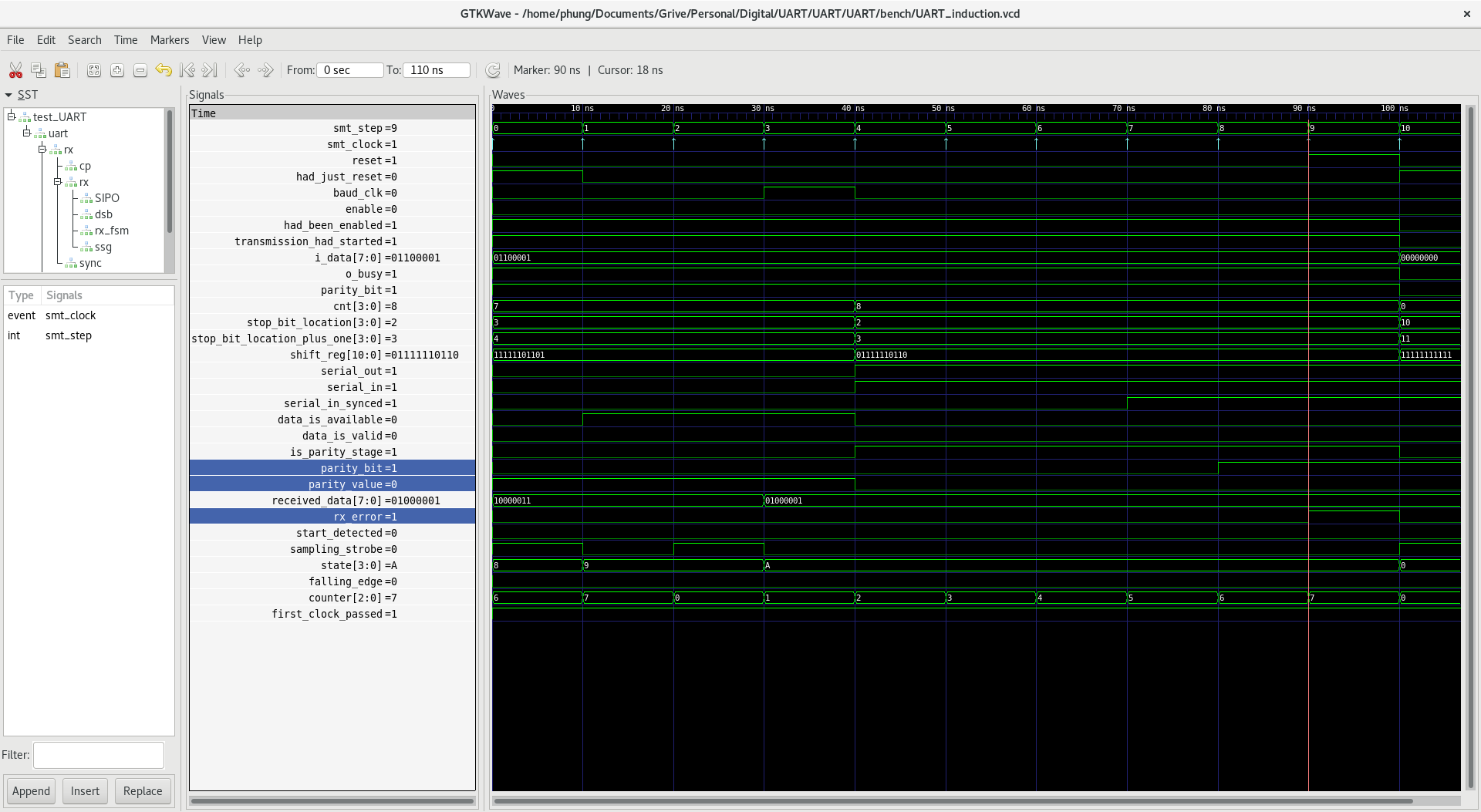
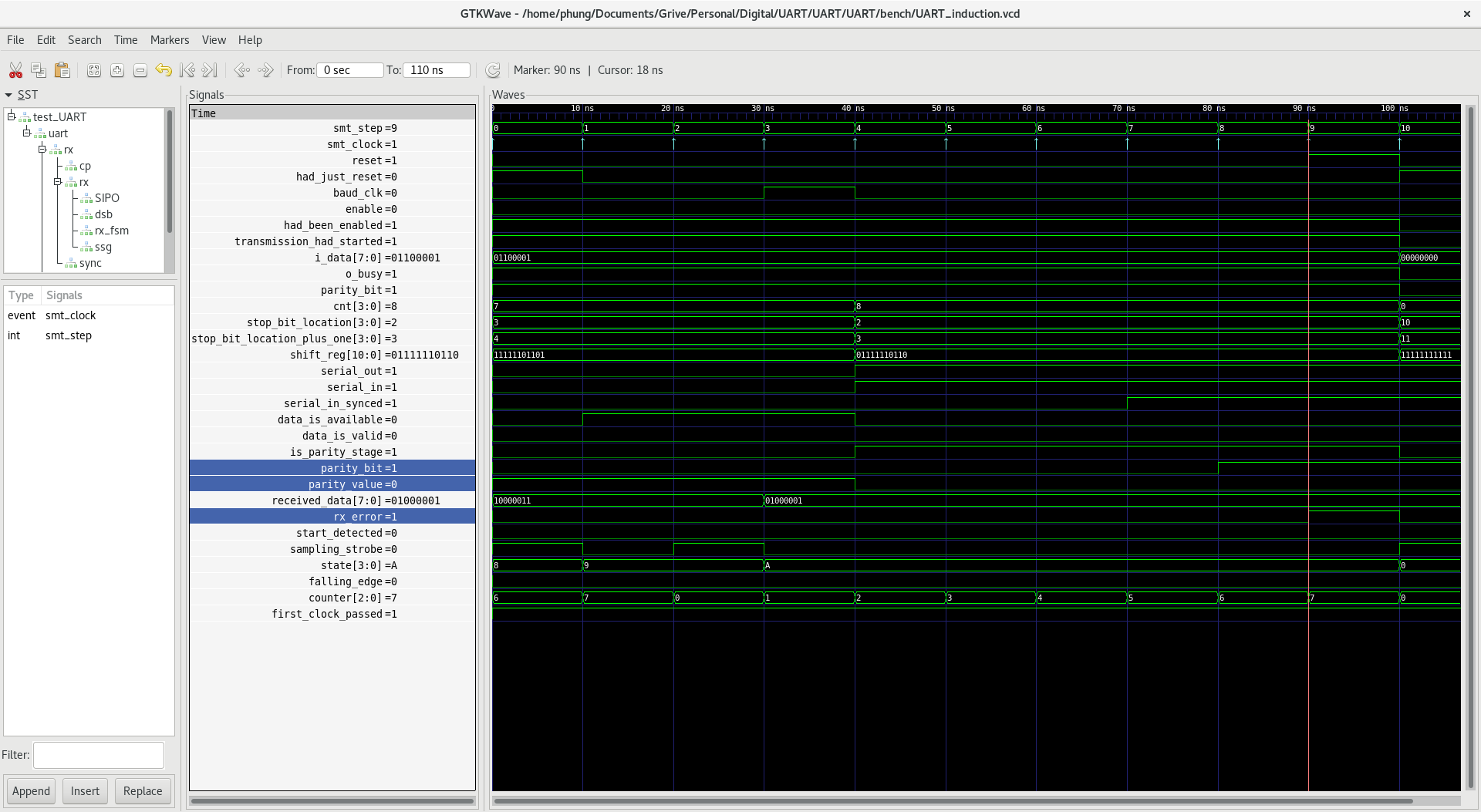
I have already added so many assert() at https://github.com/promach/UART/blob/development/rtl/test_UART.v , but during induction test, formal verification tool leads me straight to https://i.imgur.com/GNUAl7z.png which is the second last state during UART receiving mechanism at line 258 ?
Line 258 is about verifying the parity bit received against the parity value calculated from the received data, however, my coding failed this assert() test.
I am not sure what other assert() I should add before parity assertion. Could anyone advise ?
module test_UART(clk, reset, serial_out, enable, i_data, o_busy, received_data, data_is_valid, rx_error);
parameter INPUT_DATA_WIDTH = 8;
parameter PARITY_ENABLED = 1;
parameter PARITY_TYPE = 0; // 0 = even parity, 1 = odd parity
input clk;
input reset;
// transmitter signals
input enable;
input [(INPUT_DATA_WIDTH-1):0] i_data;
output o_busy;
output serial_out;
`ifdef FORMAL
wire baud_clk;
wire [(INPUT_DATA_WIDTH+PARITY_ENABLED+1):0] shift_reg; // Tx internal PISO
`endif
// receiver signals
wire serial_in;
output reg data_is_valid;
output reg rx_error;
output reg [(INPUT_DATA_WIDTH-1):0] received_data;
`ifdef FORMAL
localparam NUMBER_OF_BITS = INPUT_DATA_WIDTH + 3; // 1 start bit, 8 data bits, 1 parity bit, 1 stop bit
wire [($clog2(NUMBER_OF_BITS)-1) : 0] state; // for Rx
`endif
UART uart(.clk(clk), .reset(reset), .serial_out(serial_out), .enable(enable), .i_data(i_data), .o_busy(o_busy), .serial_in(serial_in), .received_data(received_data), .data_is_valid(data_is_valid), .rx_error(rx_error)
`ifdef FORMAL
, .state(state), .baud_clk(baud_clk), .shift_reg(shift_reg)
`endif
);
assign serial_in = serial_out; // tx goes to rx, so that we know that our UART works at least in terms of logic-wise
`ifdef FORMAL
localparam Rx_IDLE = 4'b0000;
localparam Rx_START_BIT = 4'b0001;
localparam Rx_DATA_BIT_0 = 4'b0010;
localparam Rx_DATA_BIT_1 = 4'b0011;
localparam Rx_DATA_BIT_2 = 4'b0100;
localparam Rx_DATA_BIT_3 = 4'b0101;
localparam Rx_DATA_BIT_4 = 4'b0110;
localparam Rx_DATA_BIT_5 = 4'b0111;
localparam Rx_DATA_BIT_6 = 4'b1000;
localparam Rx_DATA_BIT_7 = 4'b1001;
localparam Rx_PARITY_BIT = 4'b1010;
localparam Rx_STOP_BIT = 4'b1011;
localparam NUMBER_OF_RX_SYNCHRONIZERS = 3; // three FF synhronizers for clock domain crossing
localparam CLOCKS_PER_BIT = 8;
reg had_been_enabled; // a signal to latch 'enable'
reg[($clog2(NUMBER_OF_BITS + NUMBER_OF_RX_SYNCHRONIZERS)-1) : 0] cnt; // to track the number of clock cycles incurred between assertion of 'transmission_had_started' signal from Tx and assertion of 'data_is_valid' signal from Rx
reg transmission_had_started;
reg had_just_reset;
reg first_clock_passed;
initial begin
had_been_enabled = 0;
cnt = 0;
transmission_had_started = 0;
had_just_reset = 0;
first_clock_passed = 0;
end
always @(posedge clk)
begin
first_clock_passed <= 1;
end
wire [($clog2(NUMBER_OF_BITS-1)-1) : 0] stop_bit_location;
assign stop_bit_location = (cnt < NUMBER_OF_BITS) ? (NUMBER_OF_BITS - 1 - cnt) : 0; // if not during UART transmission, set to zero as default for no specific reason
wire [($clog2(NUMBER_OF_BITS)-1) : 0] stop_bit_location_plus_one = stop_bit_location + 1;
always @(posedge clk)
begin
assert(cnt < NUMBER_OF_BITS + NUMBER_OF_RX_SYNCHRONIZERS + 1);
assert(stop_bit_location < NUMBER_OF_BITS);
if(($past(first_clock_passed) == 0) && (first_clock_passed == 1)) begin
assert($past(stop_bit_location) == (NUMBER_OF_BITS-1));
assert($past(&shift_reg) == 1);
end
end
always @(posedge clk)
begin
if(reset) begin
cnt <= 0;
had_been_enabled <= 0;
transmission_had_started <= 0;
end
else if(baud_clk) begin
if(transmission_had_started) begin
cnt <= cnt + 1;
end
transmission_had_started <= had_been_enabled; // Tx only operates at every rising edge of 'baud_clk' (Tx's clock)
end
else begin
if(enable && (!had_been_enabled)) begin
cnt <= 0;
assert(cnt == 0);
had_been_enabled <= 1;
assert(state == Rx_IDLE);
assert(data_is_valid == 0);
if(had_just_reset) begin
assert(&shift_reg == 1);
end
assert(serial_out == 1);
assert(o_busy == 0);
end
else if(transmission_had_started) begin
if(cnt == 0) begin // start of UART transmission
assert(state < Rx_STOP_BIT);
assert(data_is_valid == 0);
assert(shift_reg == {1'b0, 1'b1, (^i_data), i_data}); // ^data is even parity bit
assert(serial_out == 0); // start bit
assert(o_busy == 1);
end
else if((cnt > 0) && (cnt < (NUMBER_OF_BITS-1))) begin // during UART transmission
assert(state < Rx_STOP_BIT);
assert(data_is_valid == 0);
assert(shift_reg[stop_bit_location_plus_one] == 1'b0);
assert(shift_reg[stop_bit_location] == 1'b1);
assert(o_busy == 1);
end
else if(cnt == (NUMBER_OF_BITS - 1)) begin // end of UART transmission
assert(state < Rx_STOP_BIT);
assert(data_is_valid == 0);
assert(shift_reg == 0);
assert(serial_out == 1); // stop bit
assert(o_busy == 1);
end
else begin // if(cnt > ((NUMBER_OF_BITS + 1)*CLOCKS_PER_BIT)) begin // UART Rx internal states
if(state == Rx_START_BIT) begin
assert(data_is_valid == 0);
assert(serial_in == 0);
assert(o_busy == 1);
assert(cnt == (NUMBER_OF_BITS + NUMBER_OF_RX_SYNCHRONIZERS + 1)*CLOCKS_PER_BIT);
end
else if((state > Rx_START_BIT) && (state < Rx_PARITY_BIT)) begin // data bits
assert(data_is_valid == 1);
assert(o_busy == 1);
assert(cnt == (NUMBER_OF_BITS + NUMBER_OF_RX_SYNCHRONIZERS + (state - Rx_START_BIT) + 1)*CLOCKS_PER_BIT);
end
else if(state == Rx_PARITY_BIT) begin
assert(data_is_valid == 0);
assert(serial_in == ^i_data);
assert(o_busy == 1);
assert(cnt == (NUMBER_OF_BITS + NUMBER_OF_RX_SYNCHRONIZERS + state + 1)*CLOCKS_PER_BIT);
end
else begin // if(state == Rx_STOP_BIT) begin // end of one UART transaction (both transmitting and receiving)
assert(state == Rx_STOP_BIT);
assert(data_is_valid == 1);
assert(serial_in == 1);
assert(o_busy == 0);
assert(cnt == (NUMBER_OF_BITS + NUMBER_OF_RX_SYNCHRONIZERS + 1)*CLOCKS_PER_BIT);
cnt <= 0;
had_been_enabled <= 0;
end
/*
else begin
assert(state == Rx_IDLE);
assert(data_is_valid == 0);
assert(serial_in == 1);
end*/
end
end
else begin // UART Tx and Rx are idling, still waiting for baud_clk
cnt <= 0;
assert(cnt == 0);
assert(state == Rx_IDLE);
assert(data_is_valid == 0);
assert(serial_out == 1);
if(!had_been_enabled) begin
assert(&shift_reg == 1);
end
end
end
end
always @(posedge clk)
begin
if(reset) begin
had_just_reset <= 1;
//assert();
end
else begin
had_just_reset <= 0;
if(!had_just_reset) begin
if((had_been_enabled) && (!$past(had_been_enabled))) begin
assert(!$past(o_busy));
assert(o_busy);
end
else if((had_been_enabled) && ($past(had_been_enabled))) begin
assert($past(o_busy));
assert(o_busy);
end
else begin
assert(!$past(o_busy));
if($past(enable)) begin
assert(o_busy);
end
else begin
assert(!o_busy);
end
assert(serial_out == 1);
end
end
end
end
always @(posedge clk)
begin
if(reset | o_busy) begin
assume(enable == 0);
end
if(enable | had_been_enabled) begin
assume($past(i_data) == i_data);
end
end
always @(posedge clk)
begin
assert(!rx_error); // no parity error
if(data_is_valid) begin // state == Rx_STOP_BIT
assert(received_data == i_data);
assert(cnt < NUMBER_OF_BITS*CLOCKS_PER_BIT);
end
if((!had_just_reset) && (state <= Rx_STOP_BIT) && (first_clock_passed) && (transmission_had_started) && ($past(transmission_had_started)) && ($past(baud_clk))) begin
assert(cnt - $past(cnt) == 1);
end
end
`endif
endmodule
{kind=link}