Hi Forum Moderators,
Figure 4-1 of SV LRM describes all the SV Regions
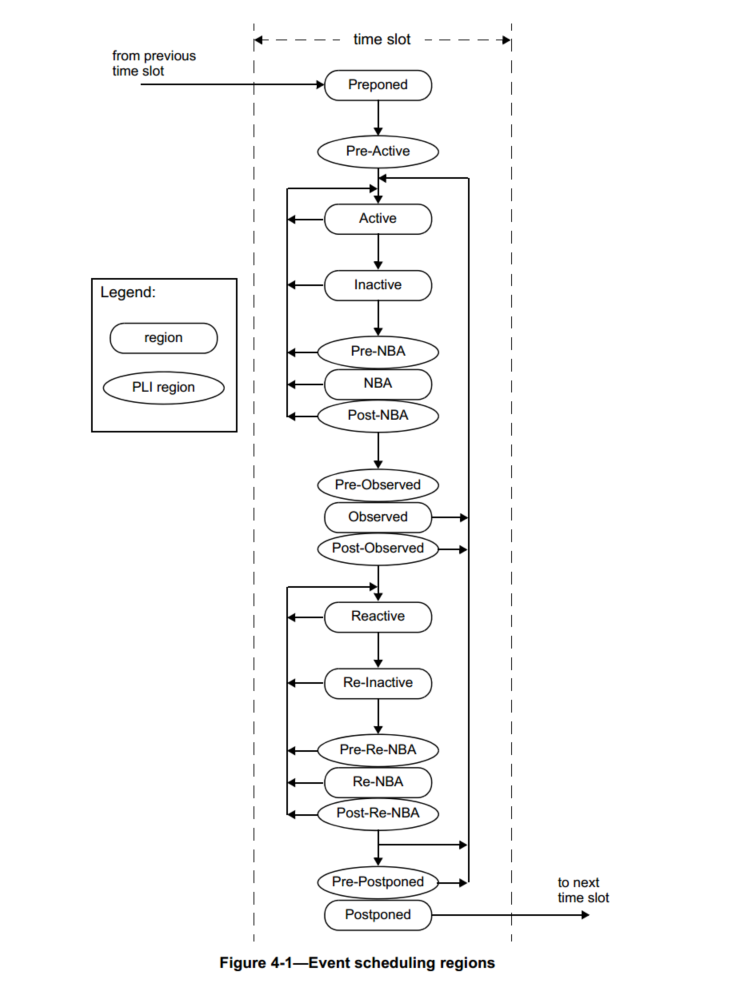
Note: There is no direct loopback from Reactive to Active.The loopback is from Re-NBA to Active.
I am trying examples that operate on
- Loopback from Active to Active
- Loopback from Reactive to Active
module tb;
bit clk ;
int c , val = 2;
always #5 clk = !clk;
always @(posedge clk) c <= c + 1; // Updated in NBA region
semaphore sema = new(0);
task automatic delay( int count );
if( count > 0 ) begin
repeat(count) @(posedge clk);
end
// For no +define :: What should the value of 'c' be in the next 2 statements ?
$display("Task completes at T:%0t with c == %0d",$time,c);
im: assert ( c == 3);
sema.put(1);
endtask
initial begin
`ifdef TASK
@(posedge clk);
delay(val);
`else
assert property( @(posedge clk) (1, delay( val )) );
`endif
sema.get(1);
$finish();
end
endmodule
(1) Using +define+TASK ::
- ‘delay’ gets called in active region at time:5 units.
- Event control @(posedge clk); would unblock in active region which is an example of loopback from Active to Active region.
- Immediate assertion would execute in Active region of T:25 using value of ‘c’ as 2
Hence fail_action block executes ( which is $error by default )
(2) Using no +define ::
- delay executes in Reactive region as it’s a subroutine called on match of sequence (1)
For (2) I am seeking inputs for the following ::
[Q1] Would the event control @(posedge clk) execute in Active region via loopback from Re-NBA to Active ?
[Q2] In which SV region would the $display() within ‘delay’ execute ?
[Q3] Would the Immediate assertion execute in Reactive region ( using value of ‘c’ as 3 ) ?
[Q4] Should the immediate assertion pass or fail at T:25 ? I observe different results across EDA tools