Hi,
I am trying to write a task which checks if the input arg. changes within 5ns. ( including a scenario where the signal changes at exactly 5ns.)
Here is my attempt ::
module tb;
int a ;
task automatic stable_a( ref int a_ip );
bit change_;
fork
begin
fork
begin:T1
@(a_ip);
change_++;
end
begin:T2
#5ns;
end
join_any
disable fork;
if( !change_ )
$display("T:%0t Input arg. unchanged",$time); // Should observe this for +define+M1
else
$display("T:%0t Input arg. changed",$time); // Should observe this for +define+M2 / +define+M3
end
join
endtask
initial begin
stable_a(a);
end
initial begin
`ifdef M1
#6;
`elsif M2
#4 a = 10;
`elsif M3
#5 a = 20;
`endif
end
endmodule
However when I run this I run into a compilation Error due to the following quote from LRM ::
“Within a fork-join_any or fork-join_none block, it shall be illegal to refer to formal arguments passed by reference other than in the initialization value expressions of variables declared in a block_item_declaration of the fork, unless the argument is declared ref static”
Any suggestions on how I could achieve the requirement ?
I am curious if there is a possible solution using fork join and make it behave as fork join_any ( maybe using fine-grain process control )
LRM doesn’t have the above restriction on fork join for arguments passed by reference.
The IEEE 1800-2023 SystemVerilog LRM
got rid of this limitation by adding a ref static argument. Until tools implement that, with only two processes, it would be easy to have one disable or kill the other process in a fork/join.
For the 3rd scenario ( using +define+M3 ) ideally the task should increment the local variable ‘change_’ resulting in the if condition being false
i.e I should observe the following message
One process writing to a variable and another process observing it at the same time is a race condition–the results are unpredictable. You would have to get SystemVerilog event regions involved.
Thanks Dave. I used loopback from NBA to Active region to eliminate the race condition.
The following works
task automatic stable_a( ref int a_ip );
bit change_;
process p1;
fork
begin:T1
p1 = process::self();
@(a_ip);
change_++;
end
begin:T2
event evnt;
#5ns;
->>evnt;
wait( evnt.triggered); // Unblocks in loopback from NBA to Active
p1.kill();
end
join
if( !change_ )
$display("T:%0t Input arg. unchanged",$time); // Should observe this for +define+M1
else
$display("T:%0t Input arg. changed",$time); // Should observe this for +define+M2 / +define+M3
endtask
Dave,
I notice that 2 out of 3 EDA tools give me the expected output for +define+M3 using wait( evnt.triggered ).
If I replace wait( evnt.triggered ) with @(evnt), I observe all 3 tools give me the desired output of T:5 Input arg. changed
Considering that ->> evnt is a nonblocking event, and using either of the 2 approach, the event gets unblocked via loopback from NBA to Active region, I am curious to know if there is a subtle difference b/w the two approaches in my code ?
One difference I am aware of is that if I were to use wait( evnt.triggered ) within a forever loop without any additional blocking statement, I would see an infinite loop. This wouldn’t be seen using event control @( evnt ).
However since there is no forever loop in my above code this difference doesn’t come into picture.
Actually, 3 out of 4 tools on EDAPlayground give the correct result. It seems that one tool has a bug with its implementation of the .triggered() method. It returns true once the event gets scheduled, not when the trigger executes.
Hi Dave,
I have a few doubts related to working of above code
(1) Is using ->>evnt legal ?
One of the tools give a compilation error ::
“A non-blocking event trigger is not allowed for automatic events.”
(2) I am to understand the working of the 3rd scenario ( where a is assigned at 5ns ) in context of SV regions
The task ‘stable_a’ gets called in active region at time:0 units
Thread T1 blocks due to @(a_ip) whereas T2 blocks due to delay #5ns Both T1 and T2 unblock ( in any possible order ) in the active region of time:5ns
T1 would increment ‘change_’ , T2 would execute ->>evnt without blocking and then block due to the wait statement. wait( evnt.triggered ) would later unblock during 2nd iteration of active region( indicated by loop from NBA to Active region ) Wouldn’t this guarantee that ‘change_a’ is incremented before wait( evnt.triggered ) unblocks ?
(3) As per your suggestion if I were to replace the wait statement with event control @(evnt), Wouldn’t the event control ( along with ->> evnt ) behave the same as wait( evnt.triggered ) in this 3rd case ?
(1) An event variable is very similar to a class variable, and that it holds a handle to an object. The unusual thing about an event variable is that it has no constructor. So whether the trigger is activated on the variable or on the event object, it holds a handle to may be subject to interpretation.
(2) hard to follow which version of the code you’re referring to, but I think your understanding is correct.
(3) Correct–there should be no difference between the wait statement and the event control.
Hi Dave,
(1) I notice that LRM Section 15.5.3 has an example ::
event blast;
initial begin
fork
-> blast;
wait ( blast.triggered );
join
end
“One process can trigger the event blast before the other process (if the processes in the fork-join execute in source order) has a chance to execute, and wait for the event.
Nonetheless, the second process unblocks and the fork terminates.
This is because the process waits for the event’s triggered state, which remains in its triggered state for the duration of the time step.”
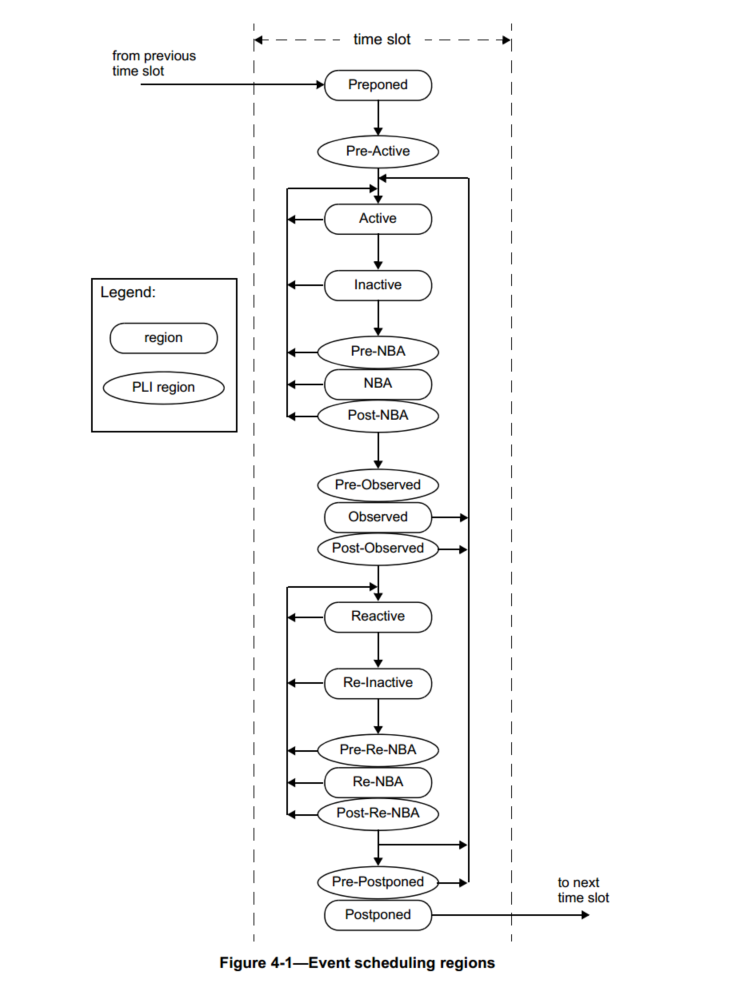
Using the above screenshot from LRM Fig 4-1 Event scheduling regions
[Q1] Does the unblocking of wait statement occur in the very 1st execution of active region at time: 0 or does it unblock in 1st iteration of active region ( via loopback from active to active region ) at time: 0 ?
I believe the answer to [Q1] is possibly related to (2)
(2) I tried using blocking event trigger ( -> evnt ) in the above example for the scenario where a is assigned at 5 time units ( using +define+M3 )
task automatic stable_a( ref int a_ip );
bit change_;
process p1;
fork
begin:T1
p1 = process::self();
@(a_ip);
change_++;
$display("T:%0t Incremented change_ ",$time); // I expected to observe this at T:5
end
begin:T2
event evnt;
#5ns;
-> evnt; // Changed from ->> evnt ;
wait( evnt.triggered);
$display("T:%0t wait Unblocks ",$time);
p1.kill();
end
join
if( !change_ )
$display("T:%0t Input arg. unchanged",$time);
else
$display("T:%0t Input arg. changed",$time); // I expected to observe this at T:5
endtask
initial stable_a(a);
initial #5ns a = 20;
Across all 3 tools I observe T:5 wait Unblocks
T:5 Input arg. unchanged
[Q2] Does the race condition still exist ?
If yes, is it because the wait statement unblocks in the very 1st iteration of active region at T:5ns and not during the 2nd iteration of active region ( via loopback from active to active region )
[A1] There is no looback because you would need to exhaust the current active region and moved to another region in order to have a loopback. That is not the case here.
[A2] Just because all tools give you the same results doesn’t mean a race does not exist. The race is between the resumption of the two #5 delays and the @(a_ip) In most cases the @(a_ip) resumption gets put at the end of the active region, but there is no requirement to do that.
Thanks Dave.
So wait( evnt.triggered ) executes in the active region of time:0 and unblocks immediately.
As a result there is no loopback from active to active region in the above case.
A final question from my side
If I were to re-write the example from LRM as ::
event blast;
initial begin
fork
wait ( blast.triggered ); // Written before event trigger
-> blast;
join
end
Assuming that code executes in source order i.e wait statement executes ( and remains blocked ) before the event trigger, can I say that there would be loopback in this particular case ? Once both statements have been executed the current active region would be exhausted and then wait statement would unblock in the 1st loopback from active to active region at time: 0
I see. So the wait( evnt.triggered ) blocks/suspends and then unblocks/resumes in the same active region of time: 0
There would be no loopback from active to active ( irrespective of whether the wait statement executes before or after the event trigger )
Hi Dave,
I was revisiting this thread in relation to a task based solution suggested by Ben in repeat-or-for-loop-in-assertion
I tried an alternate solution where I call the task on match of a sequence.
As per LRM the task executes in Reactive region
In the latter 2 cases +define+M2 & +define+M3 I expect assertion to fail due to sequence expression :: ( ($realtime - v ) >= 20ns ) returning false
(1) For +define+M2, at T:114ns ‘b’ toggles for 5th time as well as ‘a’ is asserted
(Q1) Since $rose(a) has an explicit clock attached to it, shouldn’t wait( $rose(a,@(posedge clk) ) unblock at the posedge of clk at T:115ns ?
i.e I expected task to complete at T:115ns
// My expected output
...................
T:114 @(b) occurred // Increments cntr to 5
T:115 $rose(a) is True
T:115 Task completes
cntr is 5 // As $rose(a)[->1] in property matches at T:115
(2) For +define+M3 ::
At T:115ns :: ‘b’ toggles for 5th time , ‘a’ is asserted as well as posedge of clk occurs $rose(a)[->1] within the property would match at the next posedge at T:125ns as the sampled value of ‘a’ at T:115ns is 0
However, as the task executes in reactive region I believe it’s able to detect the 0 to 1 transition and unblocks wait( $rose(a,@(posedge clk) ) ) at T:115ns
(Q2) At T:115ns does there exist a race condition b/w ::
unblocking of forever@(b) in T2 & unblocking of wait($rose(a,@(posedge clk))) in T1 ?
(Q3) At T:115ns would cntr be incremented to 5 before the disable fork executes ?
(Q4) Similar to this thread, should I be using @(evnt) / wait( evnt.triggered ) / uvm_wait_for_nba_region() to eliminate the (possible) race condition in (Q2) at T:115ns for +define+M3 ?